Prüfaufbau.
Spezielle Dorngreifer im Schnellwechselsystem des Yaskawa SDA 10F Dual-Arm-Robotersystems und ein Transportband ermöglichen die Führung geflochtener Stents.
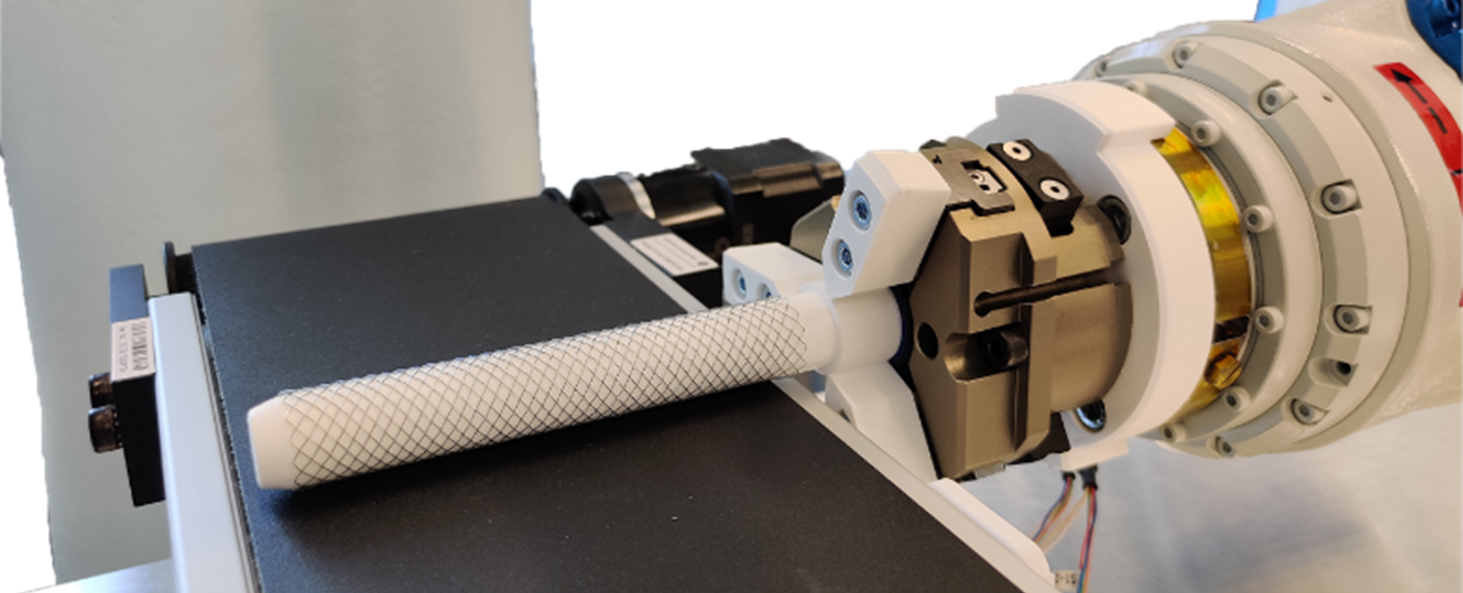
Die rechte Abbildung zeigt den Prüfaufbau zur Erkennung globaler Defekte. Der Stent wird automatisiert auf den Dorngreifer aufgeschoben und auf das Förderband gedrückt, welches unter dem Zeilenkamera-Aufnahmesystems angeordnet ist. Das Förderband treibt den Stent an und rotiert diesen um den Dorn. Die zeilenweise Aufnahme bei konstanter Rotation des Stents wird dessen zylindrisches Flechtmuster in ein planares Bild, eine sog. Abwicklung, umgewandelt. Das resultierende Bild wird der Auswertung zugeführt.
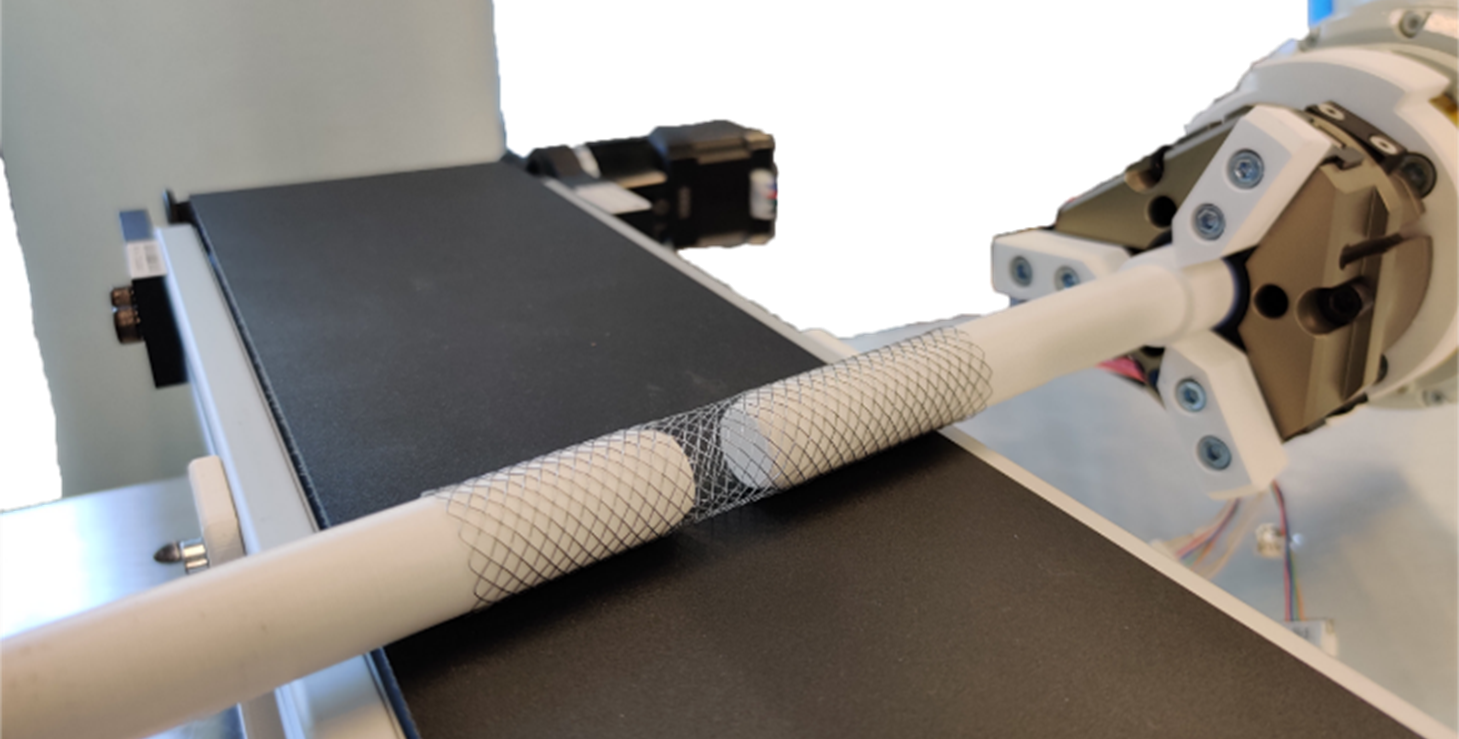
Der Prüfaufbau zur Detektion lokaler Fehler ist in der linken Abbildung zu sehen. Der Werkzeugaufbau ist, bis auf den Umstand, dass beide Roboterarme zum Einsatz kommen, mit dem der Inspektionseinrichtung für globale Fehler identisch. Die Dorne sind axial zueinander ausgerichtet und in einem Winkel über dem Förderband angeordnet. Wenn das Förderband angetrieben wird, dreht sich der Stent mit einem Vorschub in einer spiralförmigen Bewegung von einem Dorn zum anderen. Der Winkel zwischen der Spindel und dem Förderband bildet den Steigungswinkel der Spiralbewegung. Oberhalb des Förderbandes ist eine Matrixkamera positioniert. Der Bildausschnitt dieser Kamera blickt genau auf den Freiraum zwischen den beiden Dornen. Auf diese Weise kann sowohl die Innen- als auch die Außenseite des Stents inspiziert werden.